Kesin ayrıntılar:
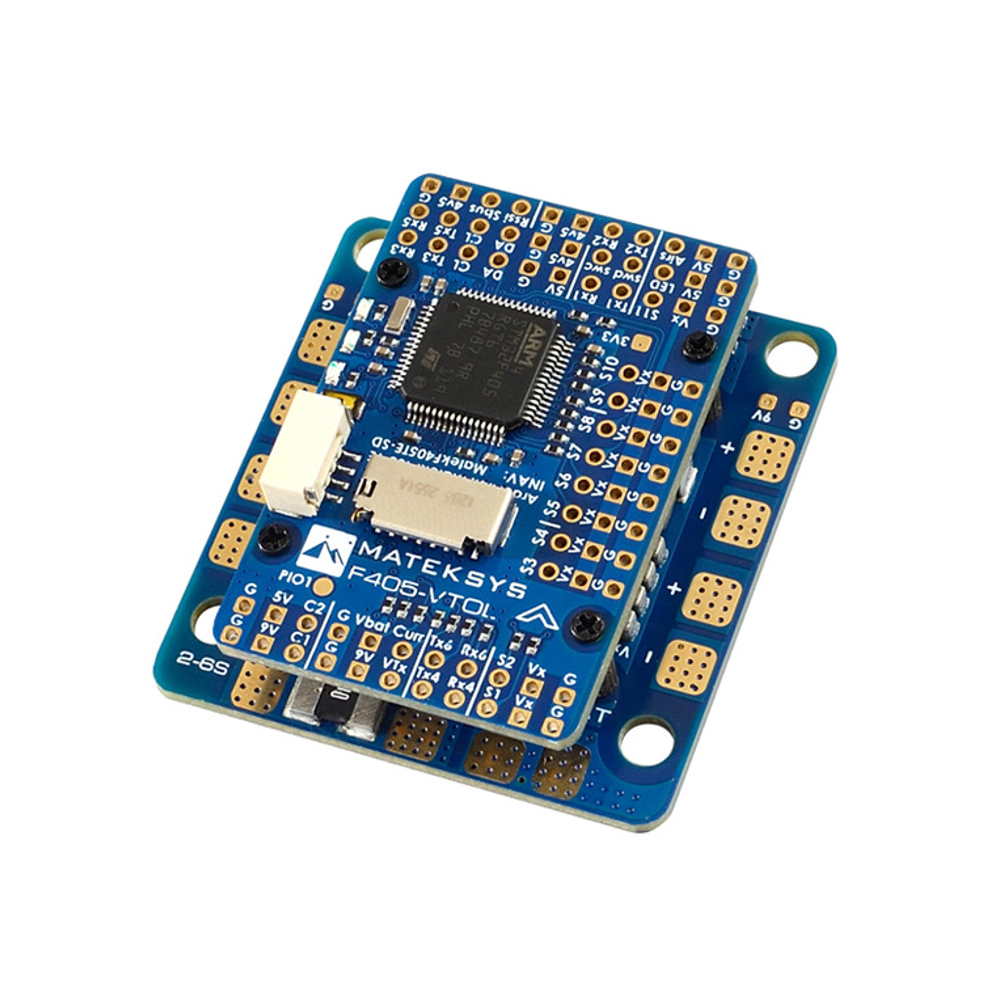
FC Özellikleri
MCU: STM32F405RGT6, 168MHz, 1MB Flash
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
Siyah kutu: MicroSD kart yuvası
6x UARTs, 1x Softserial_Tx seçeneği (INAV)
12x PWM çıkışı
1x I2C
4x ADC (VBAT, Akım, RSSI, Hava Hızı)
1x yedek PINIO
USB / Beep Uzatıcı, Type-C (USB2.0) ile
SBUS girişi için UART2-RX üzerinde entegre bir invertör
Değiştirilebilir Çift Kamera Girişi
FC Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 veya daha yeni)
Uçuş Kontrol Cihazı için Yazılım Burayı tıklayın
PDB
Giriş voltaj aralığı: 6.8~30V (2~6S LiPo)
Duyusal direnç: 100A sürekli, 220A tepe
Toplam 100A sürekli 5x ESC güç pedi
Akım sensörü direncine yakın ESC pad üzerinde 100A'ya kadar sürekli yük desteği sağlar
Dört pervaneli Quadcopter'ın her ESC pedi üzerinde 30A'ya kadar sürekli yük ve 50A'ya kadar pik destekleme
Pil Gerilim bölücü 1K:20K (INAV'da 2100 ölçeği, ArduPilot'ta BATT_VOLT_MULT 21.0)
Geçerli Sensör: 220A, 3.3V ADC (INAV'de 150 ölçekte, ArduPilot'ta 66.7 A/V )
BEC 5V çıkış
Uçuş kontrol cihazı, Alıcı, OSD, Kamera, Buzzer, 2812 LED_Dizisi, Buzzer, GPS modülü, HavaHızı için tasarlanmıştır
Sürekli akım: 2 Amper
BEC 9V /12V çıkışı
Video Verici, Kamera, Gimbal vb. için tasarlanmıştır.
Sürekli akım: 2 Amper
12V seçeneğiyle Jumper pad
Kararlı 9V/12V çıkış için, giriş gerilimi çıkış gerilimi +1V'den büyük olmalıdır.
BEC Vx çıkışı
Servolar için tasarlanmış
Gerilim ayarlanabilir, varsayılan 5V, jumper ile 6V veya 7.2V
Sürekli akım: 8 Amper, 10A Tepe
Dengeli Vx çıkışı için, giriş gerilimi Vx geriliminden büyük olmalıdır +1V
BEC 3.3V çıkışı
Baro / Pusula modülü ve harici 3.3V çevre birimleri için tasarlandı
Doğrusal Regülatör
Sürekli akım: 200mA
Fiziksel
Montaj: 25 x 25mm-Φ2mm, 35 x 35mm-Φ4mm
Boyutlar: 45 x 42 x 15mm
Ağırlık: 25g USB/sesli uyarıcı adaptörü ile
Dâhil
1x F405-VTOL
1x USB (Tip-C)/Bip (Pasif Buzzer) Uzatıcı + USB uzatıcısı için 20 cm JST-SH-6P to JST-SH-6P kablosu.
I2C portu için 1x 20cm JST-GH-4P - JST-GH-4P kablosu
1 adet Rubycon ZLH 35V 470uF kondansatör
Dupont 2.54 pinleri (Lehimlenmemiş kart gönderilir)
Düzen

VTOL Kablolama (ArduPlane)
Normal Uçak Kablolama (INAV)
INAV Haritalama
PINIO
PINIO1 / PIO1 pedi, varsayılan olarak Düşük Seviye, Mod-USER1 tarafından düşük/yüksek seviye olarak değiştirilebilir
PINIO2, Modes-USER2 ile kamera girişini değiştirmek için kullanılır
İpuçları
F405-VTOL, QC için önceden yüklenmiş INAV fw'ye sahiptir
INAV (Hedef MATEKF405TE_SD) fw 5.x veya daha yeni sürümünü INAV yapılandırıcısı 5.x veya daha yeni sürümden doğrudan indirin.
ArduPilot Haritalama
Frsky Smartport Telemetri
ters çevrilmemiş (hacked) S.Port sinyali
herhangi bir yedek Uart_TX
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 veya 10 (yaapu için)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (anket modu)
Röle (PINIO)
PINIO1, PIO1 pedi, varsayılan olarak düşük seviye
PINIO2, Kamera değiştirici, C1 varsayılan olarak AÇIK
# GPIO'lar
PA4 PINIO1 OUTPUT GPIO(81) DÜŞÜK //PIO1 ped
PB5 PINIO2 ÇIKIŞ GPIO(82) DÜŞÜK //kamera anahtarı
# RCx_SEÇENEK: RC giriş seçeneği
28 Röle Açık/Kapalı
34 Röle2 Açık/Kapalı
35 Röle3 Aç/Kapa
36 Röle4 Aç/Kapat
örneğin
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relay Açık/Kapalı, Verici CH7'yi kullanarak PIO1 Düşük/Yüksek Seviye kontrolü için
RELAY_PIN2 82 //Kamera anahtarı GPIO
RC8_OPTION 34 //Röle2 Açık / Kapalı, Yüksek / Düşük seviyeyi kontrol etmek için Vericinin CH8'i kullanın PB5 yastığında
Yardımcı anahtarın pwm değeri 1800'den yüksek olduğunda yapılandırılan özellik tetiklenecektir. Değer 1200'den düşerse, etkinleştirilmez.
Vericiden PWM değeri yüksek ve düşük anahtar konumundayken gönderilen PWM değerini kontrol edin. Eğer 1800'den daha yüksek veya 1200'den daha düşük bir değere ulaşmazsa, vericinin servo uç noktalarını ayarlamak en iyisi olacaktır. Bunun için Misyon Planlayıcının İlk Kurulum >> Zorunlu Donanım >> Radyo Kalibrasyonu ekranını kullanabilirsiniz.
İPUÇLARI
F405-VTOL, QC için önceden yüklenmiş INAV fw'ye sahiptir
Hedef MATEKF405TE_SD, INAV yapılandırıcısında 4.x.x'de listelenmemiştir. INAV5.0 veya daha yeni sürümler tarafından desteklenir
ArduPilot fw, 'Internal errors 0x4000 l:213 spi_fail' uyarısı, SD kart için LOG_BACKEND_TYPE = 1 (File) ayarlayın lütfen.